







擊QQ交談/留言")
EMERSON KJ3002X1-BF1所謂全數(shù)字交流伺服系統(tǒng)即系統(tǒng)所有的控制調(diào)節(jié)全部采用大規(guī)模數(shù)字集成電路作為系統(tǒng)的核心控制芯片,實(shí)現(xiàn)交流伺服系統(tǒng)的位置、速度和電流環(huán)的全數(shù)字化控制,通過(guò)數(shù)字處理技術(shù)由軟件控制算法來(lái)完成,直接輸出脈寬調(diào)制信號(hào)驅(qū)動(dòng)功率放大器對(duì)伺服電機(jī)進(jìn)行控制,完成系統(tǒng)的控制任務(wù)。
廈門(mén)岳航計(jì)算機(jī)工程有限公司
聯(lián)系人:李素云
企業(yè)QQ:2851195446,2851195466
手機(jī):18965423501
座機(jī):0592-5165501
全數(shù)字交流伺服系統(tǒng)的控制機(jī)理
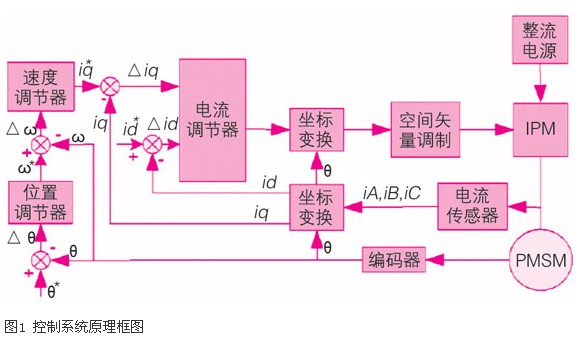
以交流永磁同步電機(jī)為控制對(duì)象,控制系統(tǒng)采用基于數(shù)字信號(hào)處理器ms320f2812(dsp)為核心的全數(shù)字伺服系統(tǒng)為例,其伺服系統(tǒng)采用位置環(huán)、速度環(huán)和電流環(huán)三閉環(huán)控制。其中,位置環(huán)實(shí)現(xiàn)的位置控制,速度環(huán)實(shí)現(xiàn)快速跟蹤,電流環(huán)采用電壓空間矢量脈寬調(diào)制(svpwm)控制算法實(shí)現(xiàn)快速動(dòng)態(tài)響應(yīng),以獲得優(yōu)良的控制性能。驅(qū)動(dòng)器控制系統(tǒng)原理如圖1所示。
06306111-100
06390130-100
034-100
2090-XXLF-X330B
HTE500.240.110
E6C-CWZ5C-400
07301111-256
NZM6-63/ZM6-63
FX0S-10MR-ES/UL
LC2D32F7
UFS200 62132-1
QUINT-PS-100-240AC/24DC/5
A5MT1200
SLS-3F
SES4+3XSES43
FCR-13A-R/M
C200H-OC222V
SW-05RM
IC200MDL243-C
6ES5430-4UA12 IC693CPU364
IC693CPU372
IC693DSM302
IC693MDL655
IC693MDL740F
IC693MDL741C
IC693PWR331
IC695CPU315
IC697ALG320
IC697BEM711
IC697CPU782
IC697MDL653
IC697MEM715B
IC697MEM717B
IS200BICLH1AED
IS215UCVEH2A
KJ3001X1-BC1
KJ3002X1-BF1
KJ3222X1-BA1
MTM-120-P-A20
NP104X905BA603 NP 104X905BA603
6BK1100-0BA01-1AA0
7207B.TVP.P5.U0
P1M063VDGA7G010
134007 UB6000-F42-E6-V15
44-2260-242
5-VMK-15-NC-54-15C11/2BD-24P
KFD2-SD-EX1.48-90A
X428880M000
170M5242
4WE6J51/AG24NZ5L
77614





 免責(zé)聲明:(1)以上所展示的信息由企業(yè)自行提供,內(nèi)容的真實(shí)性、準(zhǔn)確性和合法性由發(fā)布企業(yè)負(fù)責(zé),環(huán)球塑化網(wǎng)對(duì)此不承擔(dān)任何保證責(zé)任。我們?cè)瓌t上建議您優(yōu)先選擇“塑企通”會(huì)員合作! (2)同時(shí)我們鄭重提醒各位買(mǎi)/賣(mài)家,交易前請(qǐng)?jiān)敿?xì)核實(shí)對(duì)方身份,切勿隨意打款或發(fā)貨,謹(jǐn)防上當(dāng)受騙。如發(fā)現(xiàn)虛假信息,請(qǐng)向環(huán)球塑化網(wǎng)舉報(bào)。
免責(zé)聲明:(1)以上所展示的信息由企業(yè)自行提供,內(nèi)容的真實(shí)性、準(zhǔn)確性和合法性由發(fā)布企業(yè)負(fù)責(zé),環(huán)球塑化網(wǎng)對(duì)此不承擔(dān)任何保證責(zé)任。我們?cè)瓌t上建議您優(yōu)先選擇“塑企通”會(huì)員合作! (2)同時(shí)我們鄭重提醒各位買(mǎi)/賣(mài)家,交易前請(qǐng)?jiān)敿?xì)核實(shí)對(duì)方身份,切勿隨意打款或發(fā)貨,謹(jǐn)防上當(dāng)受騙。如發(fā)現(xiàn)虛假信息,請(qǐng)向環(huán)球塑化網(wǎng)舉報(bào)。
 簡(jiǎn)繁切換
簡(jiǎn)繁切換